Research on a Neuroplasticity-Based Adaptive Control Interface for Embodiment of Extended Artificial Bodies (Oct. 2025 – Dec. 2026)
This project aims to develop adaptive control interface technologies that provide natural control and a strong sense of embodiment when auxiliary body parts—such as a third arm or a tail—are added to the human body in the form of wearable robotics.
Unlike conventional exoskeletons that simply augment physical strength, such extended artificial bodies can enable more complex task execution through auxiliary limbs or compensate for weakened bodily functions in ways distinct from prosthetic arms or legs. To achieve this, the project will develop AI models that translate human movement signals into diverse wearable robot control signals, and design intuitive control strategies for auxiliary body parts from an integrative, multidisciplinary perspective.
In the current phase, prior to physical hardware implementation, VR simulation environments will be used to exploratorily analyze control strategies for auxiliary body parts and user adaptation processes. This foundational research will inform future designs of control interfaces that enhance embodiment and user adaptation.
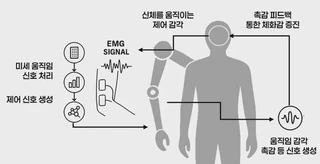
Adaptive control interface enabling natural embodiment of wearable robotic body extensions.